Robot đã đồng hành cùng con người trong hàng thập kỉ nay. Chúng có đa dạng kích cỡ, hình dạng và khác nhau về cách hoạt động. Dựa vào thiết kế, có thể phân loại robot công nghiệp làm 7 loại: robot cartesian, robot hình trụ, robot scara, robot khớp nối, robot delta, robot cực và robot cộng tác (cobot).
Trong bài viết này, chúng tôi cung cấp một số thông tin tổng quan về các loại robot thường dùng trong ngành công nghiệp, cũng như trình bày các ưu điểm, nhược điểm và ứng dụng của chúng trong sản xuất.
Robot công nghiệp là gì? Định nghĩa về robot công nghiệp
Định nghĩa robot công nghiệp
Robot công nghiệp là những cỗ máy tự động được thiết kế để thực hiện các hoạt động lặp đi lặp lại, các tác vụ đòi hỏi sự chính xác, các tác vụ nặng và thay thế con người trong môi trường độc hại hoặc khắc nghiệt. Chúng giúp giảm sai lỗi của con người và cải thiện năng suất. Việc lựa chọn đúng loại robot phù hợp với yêu cầu sản xuất là chìa khoá quan trọng đối với các doanh nghiệp.

Robot công nghiệp
Cấu tạo của robot công nghiệp
Một robot công nghiệp điển hình được cấu tạo từ các bộ phận sau:
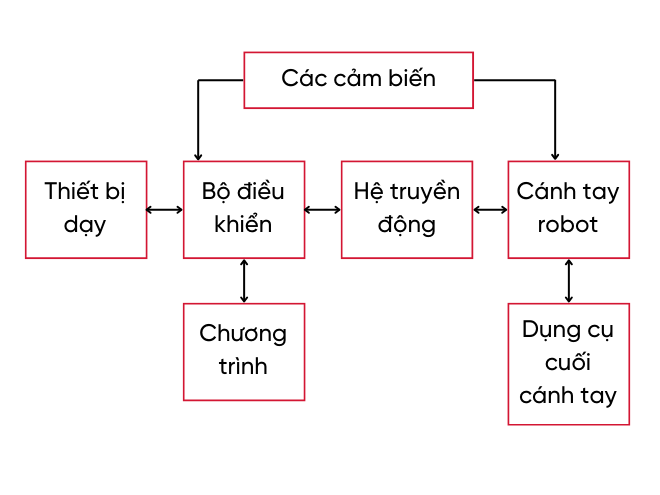
- Bộ điều khiển: đây được coi là bộ não của robot, nơi cung cấp cho robot bộ nhớ và khả năng xử lý cần thiết để hoạt động.
- Cảm biến: Robot sử dụng các cảm biến để nhận biết và thu thập dữ liệu từ môi trường xung quanh, đây là tai và mắt của robot.
- Bộ truyền động và nguồn điện: Robot có thể sử dụng các bộ truyền động bằng điện, khí nén, thuỷ lực hoặc các loại bộ truyền động khác để chuyển đổi năng lượng cần thiết cho các hoạt động của robot.
- Cánh tay robot: Được thiết kế để mô phỏng cánh tay con người, cánh tay robot là một cấu trúc được tạo thành từ nhiều đoạn được nối với nhau bằng khớp nối/liên kết. Các khớp có thể là khớp gấp, khớp xoay,... và có thể lập trình được để di chuyển theo mong muốn.
- Dụng cụ cuối cánh tay hoặc dụng cụ thao tác: là các dụng cụ hoặc thiết bị được gắn vào cuối cánh tay robot để thực hiện tác vụ, chẳng hạn như các loại tay gắp, tay kẹp, camera, đầu hàn,..
Các loại robot công nghiệp
Trên thị trường hiện nay có nhiều loại robot công nghiệp dành cho các ứng dụng khác nhau, với các thiết kế và điểm mạnh khác nhau. Trong bài viết này, Temas đề cập đến 7 loại robot công nghiệp phổ biến nhất trên thị trường, cũng như các ưu điểm và nhược điểm của chúng.
Cartesian robot
Cartesian robot, còn được gọi là robot tuyến tính, robot toạ độ Descartes, là một loại robot công nghiệp thực hiện chuyển động tuyến tính trong không gian (tức chúng di chuyển theo đường thẳng chứ không phải xoay). Chúng di chuyển dọc theo các trục x, y, z vuông góc với nhau và tạo thành một vùng làm việc hình khối.
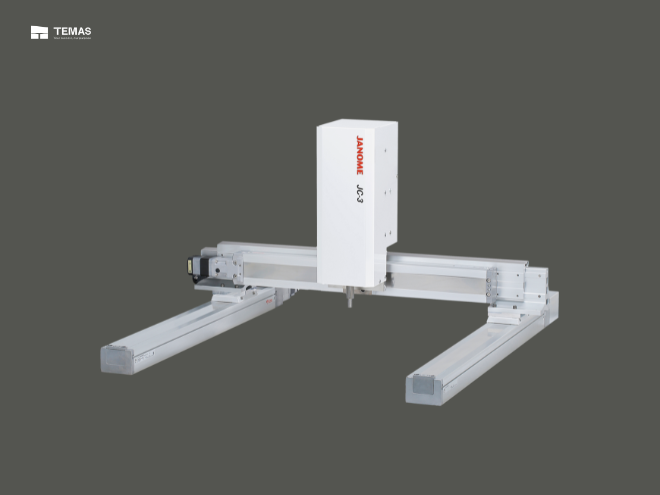
Robot Cartesian Janome
Robot Cartesian được lấy tên từ hệ toạ độ Descartes (Cartesian coordinate system), hệ toạ độ này biểu thị các điểm trong không gian dưới dạng hàm theo khoảng cách ngắn nhất với các trục được xác định trước.
Hệ thống truyền động của robot Cartesian có thể là truyền động bằng dây đai, truyền động bằng trục vít, truyền động bằng cáp hoặc bằng thanh răng và bánh răng, hoặc các động cơ tuyến tính.
Ưu điểm của robot Cartesian
- Thiết kế và vận hành đơn giản: Robot Cartesian có thiết kế đơn giản bởi chúng chỉ chuyển động theo 3 trục thẳng x, y, z. Do đó, có thể dễ dàng cấu hình, lập trình và vận hành chúng.
- Độ chính xác cao: Nhờ thiết kế đơn giản, robot Cartesian có thể điều khiển được chính xác và dễ dàng. Các chuyển động của chúng có độ chính xác cao nên thường được sử dụng trong các ứng dụng đòi hỏi độ chính xác.
- Giá cả phải chăng: Robot Cartesian có cấu trúc đơn giản nên chi phí đầu tư ban đầu khá rẻ. Ngoài ra, có thể cấu hình lại robot Cartesian cho các ứng dụng khác nhau nên nhìn chung chúng đem lại hiệu quả về mặt chi phí.
Nhược điểm của robot Cartesian
- Tốn diện tích: Trong tất cả các loại robot công nghiệp, robot Cartesian là một trong những robot tốn diện tích nhất. Hoạt động theo 3 trục thẳng x, y, z, chúng cần một không gian hình khối để vận hành.
- Tốc độ hạn chế: Robot Cartesian có tốc độ chậm, do đó chúng không phù hợp cho các ứng dụng yêu cầu tốc độ nhanh.
- Thiếu sự linh hoạt: Do chỉ chuyển động theo 3 trục thẳng vuông góc với nhau nên robot Cartesian chỉ phù hợp với những chuyển động cụ thể mà chúng được thiết kế. Do đó chúng thiếu tính linh hoạt và không phù hợp với các ứng dụng phức tạp.
- Dễ nhiễm bẩn: Do cơ cấu của robot Cartesian có nhiều cơ cấu mở nên robot dễ bị nhiễm bẩn (bụi, dầu mỡ,...), dẫn đến các bộ phận nhanh bị mòn và bị hỏng.
Ứng dụng của robot Cartesian
Do có độ chính xác cao và dễ vận hành, robot Cartesian thường được sử dụng trong các ứng dụng gắp thả sản phẩm nhỏ (pick-and-place), dùng trong các quy trình đóng gói và kiểm tra. Chúng cũng được sử dụng trong các ứng dụng vẽ đồ thị, in 3D, cắt và CNC.
Robot có khớp nối
Robot có khớp nối là các robot công nghiệp có khớp có thể xoay được. Các khớp của chúng thường được cung cấp năng lượng bởi động cơ servo, và được gọi là trục của robot.
Chuyển động của robot có khớp nối được thiết kế để mô phỏng chuyển động của bàn tay con người. Thông thường các robot có 4 hoặc 6 khớp nối (robot 4 trục, robot 6 trục), tuy nhiên trong một số thiết lập phức tạp hơn, robot có thể có đến 10 khớp nối.
Robot có khớp nối
Ưu điểm của robot có khớp nối
- Độ linh hoạt cao: Robot có khớp nối có nhiều khớp, cho phép robot di chuyển linh hoạt hơn, tiếp cận được nhiều vị trí hơn và phù hợp cho các ứng dụng yêu cầu sự linh hoạt.
- Tốc độ cao: Các robot có khớp nối có thể đạt được tốc độ cao, giúp cải thiện năng suất.
Nhược điểm của robot có khớp nối
- Phức tạp: Các robot có khớp nối được thiết kế tương đối phức tạp hơn các loại robot chỉ thực hiện chuyển động tuyến tính hoặc chuyển động xoay ngang. Những khớp quay đòi hỏi nhiều bộ phận hơn và cần xem xét cẩn thận hơn khi chế tạo.
- Đắt đỏ: Do cấu trúc của robot có khớp nối rất phức tạp nên việc sản xuất và vận hành chúng khó khăn hơn so với các loại robot đơn giản, dẫn đến chi phí đầu tư và bảo trì cao.
Ứng dụng của robot có khớp nối
Nhờ tính linh hoạt của chúng nên robot có khớp nối được sử dụng trong rất nhiều ứng dụng khác nhau. Chúng đặc biệt phù hợp với các ứng dụng cần sự khéo léo và cần tiếp cận đa dạng các vị trí như: sơn, phủ, hàn, đóng gói,...
Robot hình trụ
Robot hình trụ là robot công nghiệp có khớp quay ở chân đế và cánh tay có khớp hình lăng trụ. Robot có ba trục chuyển động, trong đó có hai trục tuyến tính và một trục chuyển động xoay. Trục được kết nối với đế của robot có thể quay, và cánh tay có thể di chuyển lên xuống, thậm chí mở rộng để tạo thành một không gian làm việc hình trụ.
Ưu điểm của robot hình trụ
- Khả năng chịu tải cao: Robot hình trụ có tải trọng cao, có thể dễ dàng mang các vật nặng bằng tay của chúng.
Nhược điểm của robot hình trụ
- Chiếm nhiều không gian: Robot hình trụ chiếm nhiều diện tích sàn nhưng không mang lại nhiều lợi thế đáng kể, khiến chúng ít được ưa chuộng so với các robot công nghiệp khác.
- Giới hạn trong chuyển động: Dù robot hình trụ có thể hoạt động trong một không gian làm việc hình trụ khá rộng, nhưng nó chỉ di chuyển các vật thể từ mặt phẳng này sang mặt phẳng khác mà không thể lật ngược độ vật.
Ứng dụng của robot hình trụ
Robot hình trụ được sử dụng trong các hệ thống tự động hoá hàn, xử lý vật liệu, vận hành lắp ráp, sơn và một số ứng dụng khác yêu cầu làm việc với hình tròn đối xứng.
Robot hình cầu
Robot hình cầu, hay robot polar, robot cực, là một loại robot công nghiệp có hai khớp quay và một khớp chuyển động tuyến tính. Các khớp quay phụ trách chuyển động quay và nâng robot theo phương thẳng đứng. Khớp tuyến tính giúp robot mở rộng vùng làm việc, cho nó tạo một không gian làm việc hình cầu xung quanh nó.
Những robot này được đặt tên dựa trên toạ độ cực, hệ toạ độ trong đó mỗi điểm trong không gian được đo lường bởi khoảng cách của nó với điểm gốc và góc tạo bởi nó với các trục về điểm gốc. Robot hình cầu là một trong những loại robot chạy bằng điện đầu tiên có thể di chuyển trong không gian dưới sự điều khiển hoàn toàn của máy tính.
Ưu điểm của robot hình cầu
- Khả năng nâng tải tốt: Nhờ các khớp nối chắc chắn, robot hình cầu có thể nâng được các vật có tải trọng cao.
Nhược điểm của robot hình cầu
- Chiếm nhiều không gian: Thiết kế của robot hình cầu khá cồng kềnh, không thực sự tối ưu được không gian làm việc sẵn có.
- Thiết kế phức tạp: Robot hình cầu có nhiều khớp nối, các khớp nối có thiết kế phức tạp.
- Giá thành cao: Do thiết kế phức tạp nên việc đầu tư ban đầu và vận hành bảo trì robot hình cầu khá tốn kém.
Ứng dụng của robot hình cầu
Ngày nay, robot hình cầu hầu hết được thay thế bằng các robot có khớp nối do robot khớp nối linh hoạt hơn và có hiệu suất vượt trội hơn, tuy nhiên một số nhà máy vẫn sử dụng chúng cho các ứng dụng ép phun, xử lý vật liệu, hàn và một số ứng dụng thông thường khác.
Robot Delta
Robot delta, còn gọi là robot nhện, là robot công nghiệp được thiết kế với khung dạng hình tam giác. Phần khung tam giác được gắn ngay phía trên khu vực làm việc, với mỗi tay chứa một động cơ servo mô men xoắn cao.
Trục của động cơ được kết nối với một cánh tay gọi là “bắp tay”, kéo dài theo hướng vuông góc với trục quay của động cơ. Đầu còn lại của bắp tay được nối với các thanh sắp xếp theo hình bình hành. Tuỳ vào ứng dụng, các thanh hình bình hành này được nối với nhiều dụng cụ thao tác khác nhau.
Phần lớn trọng lượng của robot nhện là ở động cơ được kết nối với chân đế, giúp các bộ phận chuyển động nhẹ nhàng. Do đó, các bộ phận chuyển động có quán tính thấp, có thể tăng tốc nhanh và làm việc ở tốc độ cao.
Ưu điểm của robot delta/robot nhện
- Tốc độ nhanh, khả năng tăng tốc nhanh: Do bộ phận di chuyển là các thanh có khối lượng nhẹ nên chúng chuyển động theo quán tính thấp, từ đó giúp robot tăng tốc nhanh chóng và hoạt động ở tốc độ cao.
Nhược điểm của robot delta/robot nhện
- Không thể mang tải nặng: Do các thanh sử dụng để giữ vật khá mỏng và nhẹ nên robot delta không mang được tải nặng, không phù hợp với các ứng dụng yêu cầu tải trọng cao.
Ứng dụng của robot delta/robot nhện
Robot delta/robot nhện rất phù hợp cho các ứng dụng cần gắp đặt nhanh các sản phẩm nhỏ như trong ngành y tế, dược phẩm hoặc chế biến thực phẩm. Chúng cũng được sử dụng trong một số công đoạn đóng gói và hàn.
SCARA robot
Robot SCARA là viết tắt của cụm từ “Selective Compliance Assembly Robot Arm” (Cánh tay robot lắp ráp tuân thủ chọn lọc). Đúng như tên gọi, SCARA là các robot có dạng khớp nối đặc biệt đi kèm với các khớp nối quay. Chúng có thể di chuyển cơ học theo trục x và y, di chuyển cố định ở trục z (chỉ lên xuống).
Ưu điểm của robot SCARA
- Khả năng lặp lại tốt: Trong tất cả các robot có khớp nối, SCARA là robot có khả năng lặp lại tốt nhất.
- Dễ lắp đặt và tiết kiệm diện tích: Robot SCARA có chân đế xoay, có thể dễ dàng gắn trên bề mặt cứng bằng giá đỡ. Giá đỡ của robot có diện tích nhỏ, giúp tiết kiệm không gian lắp đặt.
- Tốc độ cao (với tải trọng vừa phải): Thay vì treo lơ lửng trên khu vực làm việc (như robot nhện), robot SCARA có chân đế được gắn chắc chắn trên bề mặt làm việc, giúp chúng có khả năng mang những đồ vật có tải trọng nặng hơn và khả năng chống chịu tốt hơn. Điều này cho phép chúng làm việc với tải trọng nặng nhưng vẫn đảm bảo tốc độ nhanh.
Nhược điểm của robot SCARA
- Tải trọng thấp: Phù hợp với các ứng dụng đòi hỏi tải trọng nhẹ đến trung bình, robot SCARA được thiết kế để mang những vật có tải trọng nhẹ đến trung bình (tầm 10kg) để đảm bảo vẫn giữ được tốc độ nhanh và tiết kiệm không gian. Do đó robot SCARA không phù hợp cho các ứng dụng yêu cầu tải trọng cao.
- Giới hạn trong chuyển động: Cũng như robot hình trụ, các robot SCARA không thể xoay và lật đồ vật, do đó chúng có chuyển động giới hạn hơn.
Ứng dụng của robot SCARA
Ứng dụng chính của robot SCARA là gắp thả sản phẩm ở tốc độ cao và độ chính xác cao. Chúng là những robot linh hoạt, thường được sử dụng cho các ứng dụng như hàn, khắc, xử lý vật liệu,...
Robot cộng tác (Cobot)
Robot cộng tác, hay cobot (viết tắt của cụm từ “Collaborative robot”) là một dạng robot công nghiệp được thiết kế đặc biệt để làm việc chung một không gian với con người.
Những robot này có khả năng phối hợp với con người trong nhiều tác vụ và đồng thời làm những công việc tự động hoá. Vì cobot làm việc chung với con người nên yếu tố nổi bật nhất của chúng là các tính năng an toàn.
Cobot sử dụng các loại cảm biến khác nhau (cảm biến lực, cảm biến mô men,..) để xác định các chuyển động của con người và đảm bảo sự an toàn cho con người cũng như các vật thể khác xung quanh. Một số loại cobot còn được thiết kế để giảm tốc độ và lực khi có con người ở gần nhằm đảm bảo an toàn. Mặc dù vậy, những con cobot vẫn đảm bảm được về năng suất và hiệu quả để làm việc được trong môi trường công nghiệp khắc nghiệt.
Với nhiều khớp, thành phần và đặc biệt nhiều tính năng an toàn, thông minh, cobot được thiết kế một cách rất phức tạp. Do đó giá thành của chúng cũng cao hơn đáng kể so với robot công nghiệp thông thường, nhưng thực sự giúp nâng cao hiệu quả làm việc, đặc biệt khi kết hợp cùng con người.
Ưu điểm của cobot/ robot cộng tác
- An toàn: Cobot không chỉ đặc biệt an toàn với con người mà còn an toàn với vật thể xung quanh chúng. Không giống các loại robot công nghiệp khác cần khung sắt hoặc rào chắn, cobot với các miếng đệm bọc mềm và nhiều cảm biến đa dạng sẽ giúp đảm bảo sự an toàn cho con người và vật thể xung quanh.
- Đơn giản: Cobot có phần mềm sử dụng với giao diện thân thiện và đơn giản, thậm chí với cả người chưa có nhiều kinh nghiệm với robot. Chúng được thiết kế để làm việc cộng tác cùng con người do đó kể cả phần lập trình cũng rất dễ dàng và trực quan để quá trình cộng tác giữa con người và cobot thuận lợi hơn.
- Linh hoạt: Nhờ việc dễ dàng cài đặt và cấu hình lại một cobot nên ta có thể dễ dàng chuyển đổi giữa các mục đích hoạt động hoặc ứng dụng khác nhau.
Nhược điểm của robot cộng tác
- Tốc độ giới hạn: Để đảm bảo an toàn cho con người, cobot thường làm việc ở một tốc độ giới hạn kể cả khi chúng có thể tăng tốc nhanh hơn nữa.
- Chi phí cao: Do cấu trúc phức tạp và trang bị nhiều tính năng an toàn, cobot thường có giá thành đầu tư ban đầu khá cao.
- Yêu cầu nhiều phê duyệt: Các quốc gia trên thế giới có các quy tắc khác nhau để đảm bảo robot cộng tác an toàn tuyệt đối với con người khi làm việc cùng. Do đó để xây dựng một hệ thống làm việc cộng tác giữa con người và cobot trong nhà máy sẽ yêu cầu nhiều yếu tố an toàn và các giấy phép cần thiết.
Ứng dụng của robot cộng tác
Cobot có thể sử dụng trong nhiều ứng dụng khác nhau do tính linh hoạt khi chuyển động, khả năng cấu hình lại đơn giản và có thể cộng tác cùng con người.
Những ứng dụng phổ biến trong công nghiệp của cobot có thể kể đến là bắt vít, đánh bóng, hàn seal, gắp thả sản phẩm,... Ngoài ra, cobot cũng được biết đến với các ứng dụng trong đời sống như trình diễn, bán hàng, phục vụ, hỗ trợ y tế,... điều mà những robot công nghiệp khác không thể làm được.

Một cobot đang phục vụ cà phê tại một quán cà phê ở Singapore
Tổng kết: So sánh các loại robot công nghiệp
| Loại robot | Ưu điểm | Nhược điểm | Ứng dụng |
| Robot Cartesian |
|
|
Gắp thả sản phẩm theo đường thẳng, in 3D, cắt,... |
| Robot có khớp nối |
|
|
Sơn, phủ, hàn, đóng gói, nhiều ứng dụng khác,... |
| Robot hình trụ |
|
|
Hàn, sơn, xử lý vật liệu,... |
| Robot hình cầu |
|
|
Ép phun, hàn, xử lý vật liệu,... |
| Robot delta (robot nhện) |
|
|
Gắp thả sản phẩm nhẹ và yêu cầu tốc độ nhanh |
| Robot SCARA |
|
|
Gắp thả sản phẩm yêu cầu độ chính xác cao, hàn, xử lý vật liệu,... |
| Robot cộng tác (cobot) |
|
|
Bắt vít, tra keo, hàn seal, gắp thả sản phẩm,.. Thường sử dụng trong các ứng dụng làm việc cộng tác cùng con người |
Trên đây, Temas đã trình bày về định nghĩa robot công nghiệp, phân loại và ứng dụng của chúng. Temas phân phối các loại robot công nghiệp: Robot cộng tác Techman, robot Cartesian Janome, Robot SCARA Epson,... Xem thêm về danh mục các loại robot chúng tôi phân phối tại đây.

 Đọc tiếp
Đọc tiếp