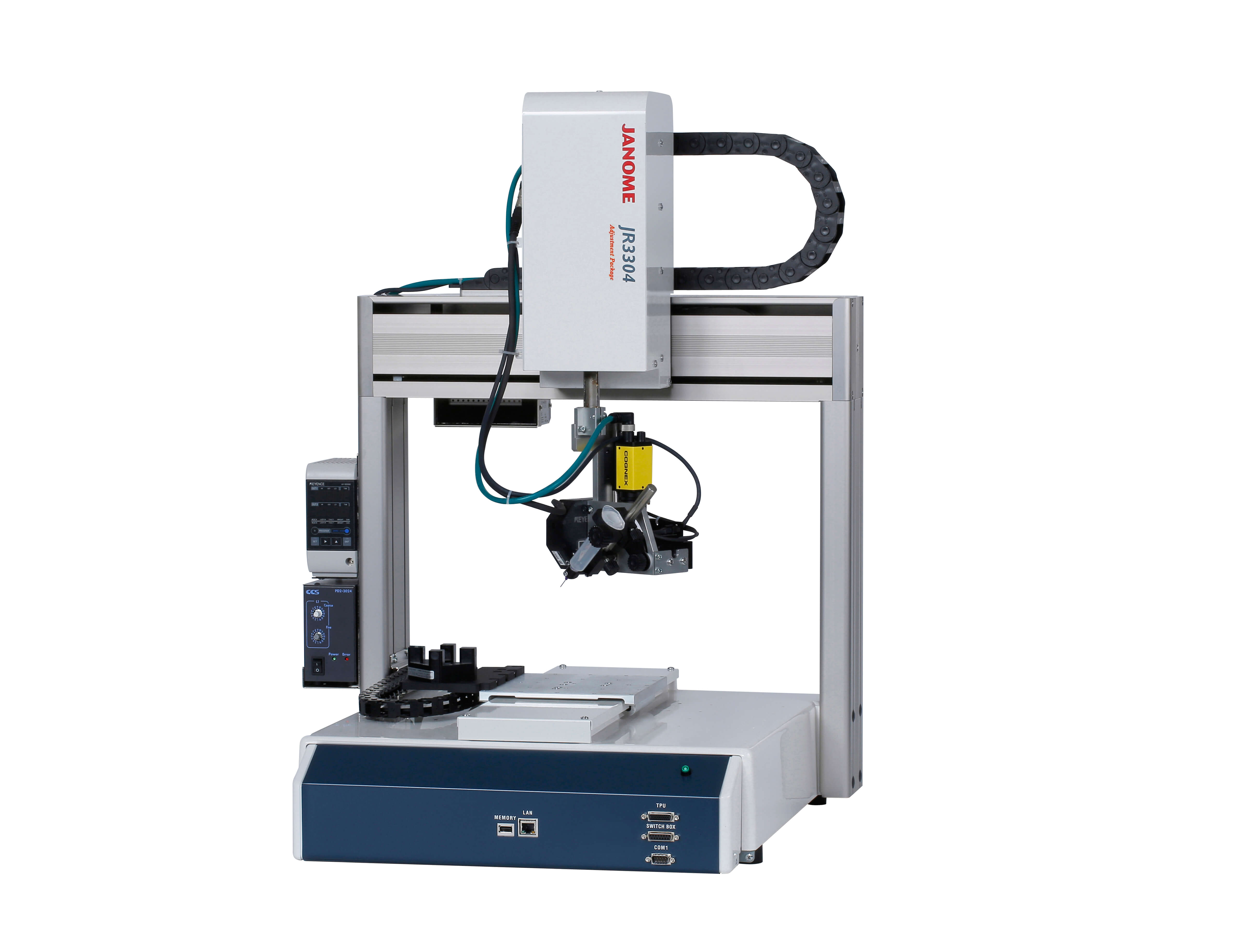
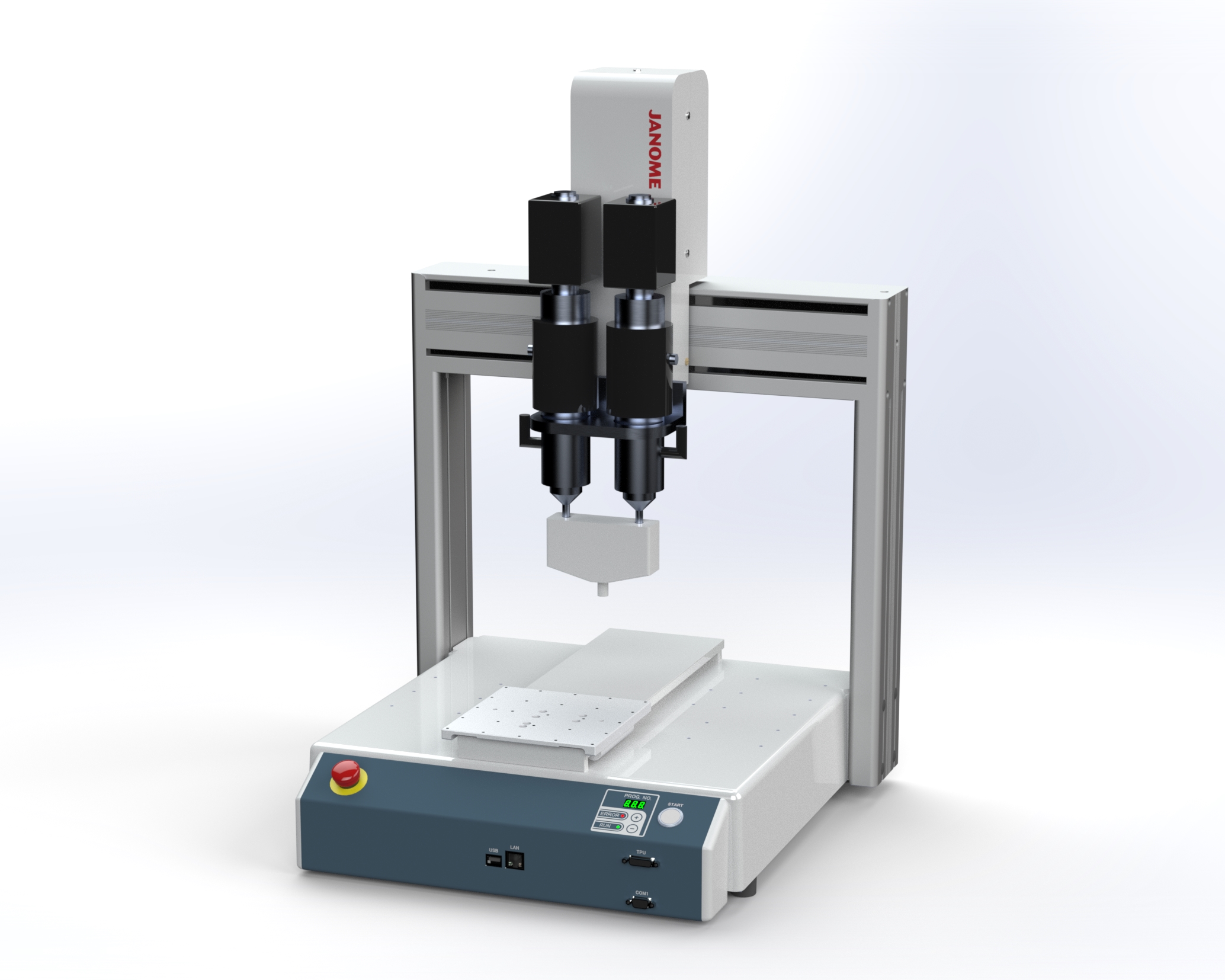
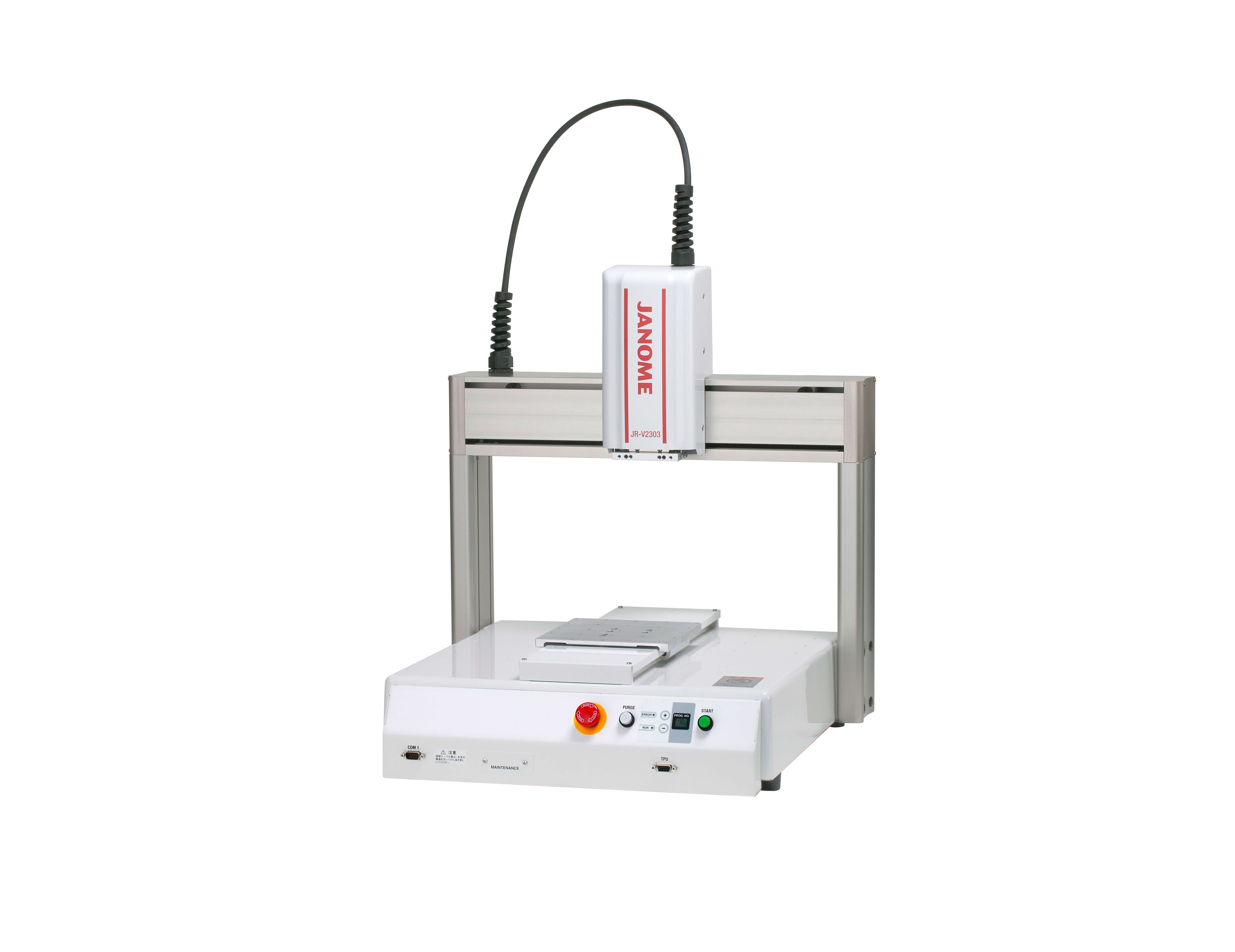
Robot tra keo tích hợp hệ thống xử lý hình ảnh và cảm biến đo khoảng cách hiện đại.
Model: JR3303AP-D, JR3303AP-D, JR3304AP-D, JR3404AP-D





| Mã sản phẩm | JR3303AP-D | JR3403AP-D |
JR3304AP-D |
JR3404AP-D |
| Số trục | 3 trục | 3 trục | 4 trục | 4 trục |
| Vùng làm việc trục X*Y*Z | 300*320*100 | 400*400*150 | 300*320*100 | 400*400*150 |
| Vùng làm việc trục R | / | / | +/-360° | +/-360° |
| Tải trọng |
Trục X: 14kg / Trục Z: 5kg |
|||
| Tốc độ | 850mm/s | |||
|
Sai số lặp lại |
+/-0.007mm |
X,Y,Z: +/-0.01mm / R: +/-0.008° |
||
|
Kích thước W*D*H(mm) |
628*608*657 | 651*668*715 |
628*608*769 |
651*668*844 |
|
Khối lượng |
42kg | 51kg |
44kg |
55kg |
Thông tin chung phần điều khiển
| Dung lượng chương trình | 999 chương trình | |||
| Dung lượng dữ liệu | 32.000 điểm | |||
| I/O-SYS | 16 vào/ 16 ra | |||
| I/O-1 | 8 vào/ 8ra (tùy chọn) | |||
| I/O-MT | Điều khiển 2 motor ngoài(tùy chọn) | |||
| I/O-S | Kết nối thiết bị bảo về (tùy chọn) | |||
| Truyền thông | EtherNet/IP /PROFINET / CC-Link /DeviceNet / PROFIBUS / CANopen ( tùy chọn) | |||
| COM | RS232C | |||
| MEMORY | Lưu/đọc dữ liệu từ tay dạy và chỉnh sửa dữ liệu, cập nhập phần mềm | |||
| LAN | Kết nối với PC qua ethernet (điều khiển robot và kết nối với phần mềm "JR C-Point II") | |||
| Nguồn cấp | AC100-120V/AC200-240V (1 pha) | |||
| Công suất | 280W | |||