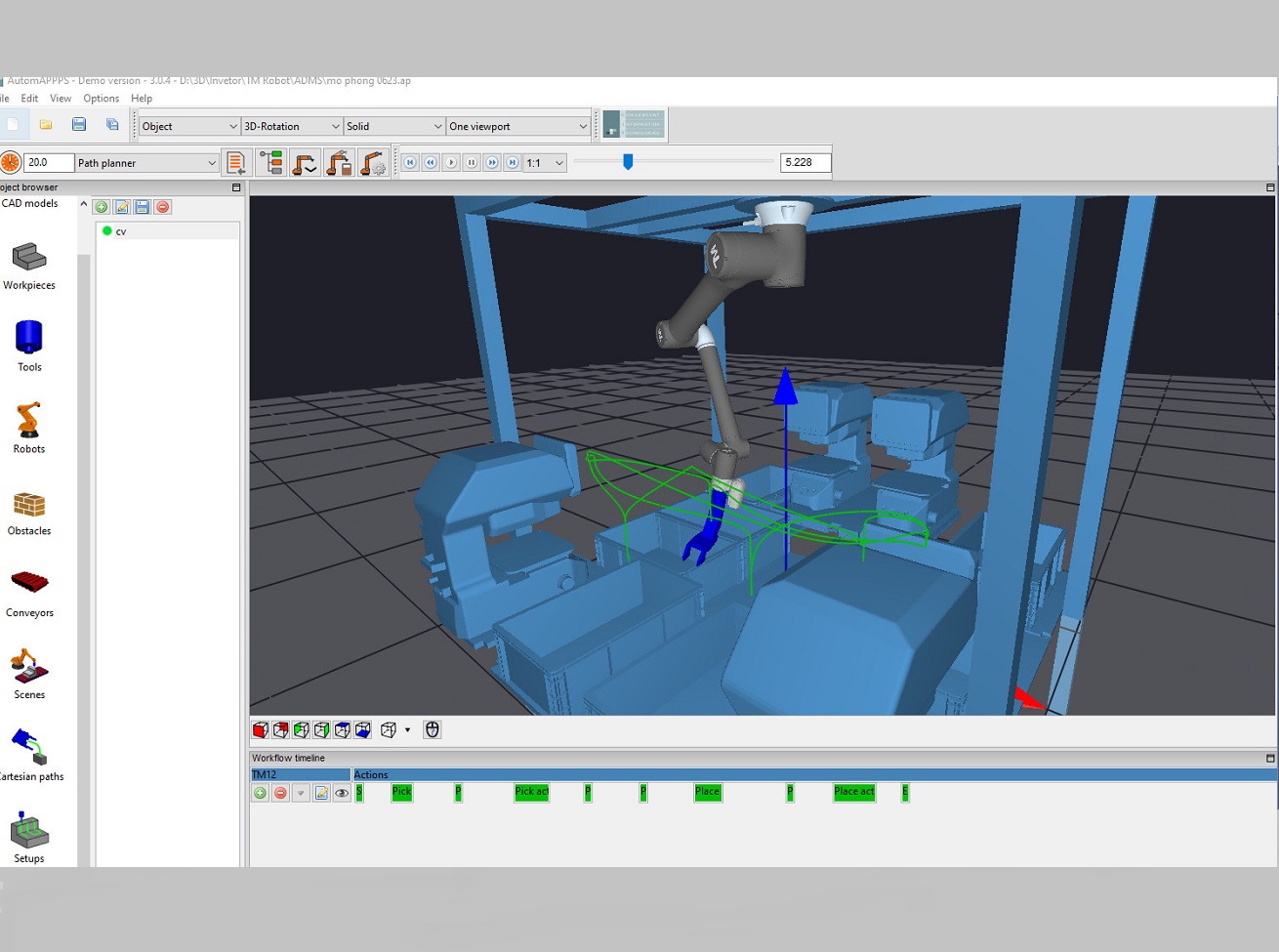
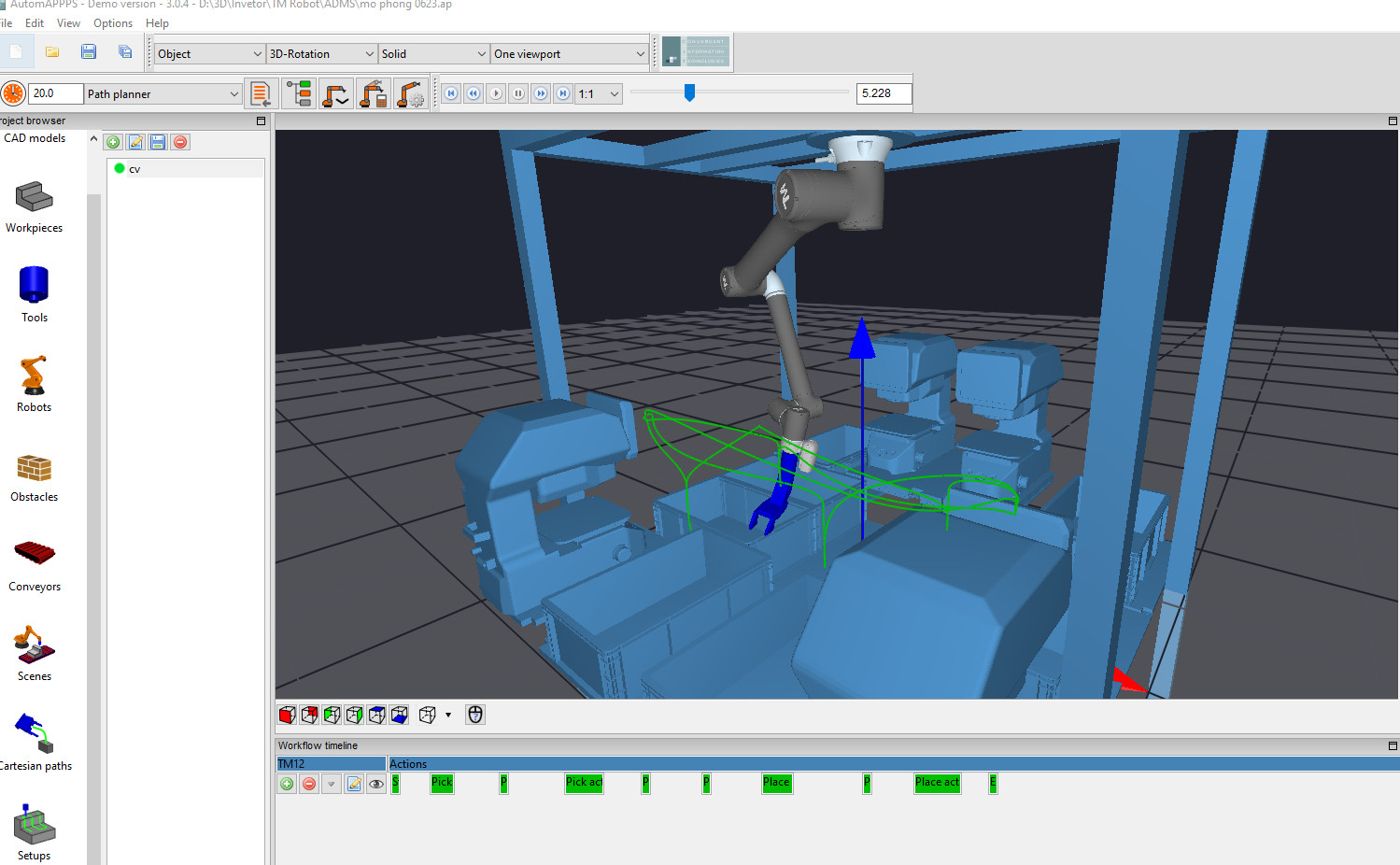
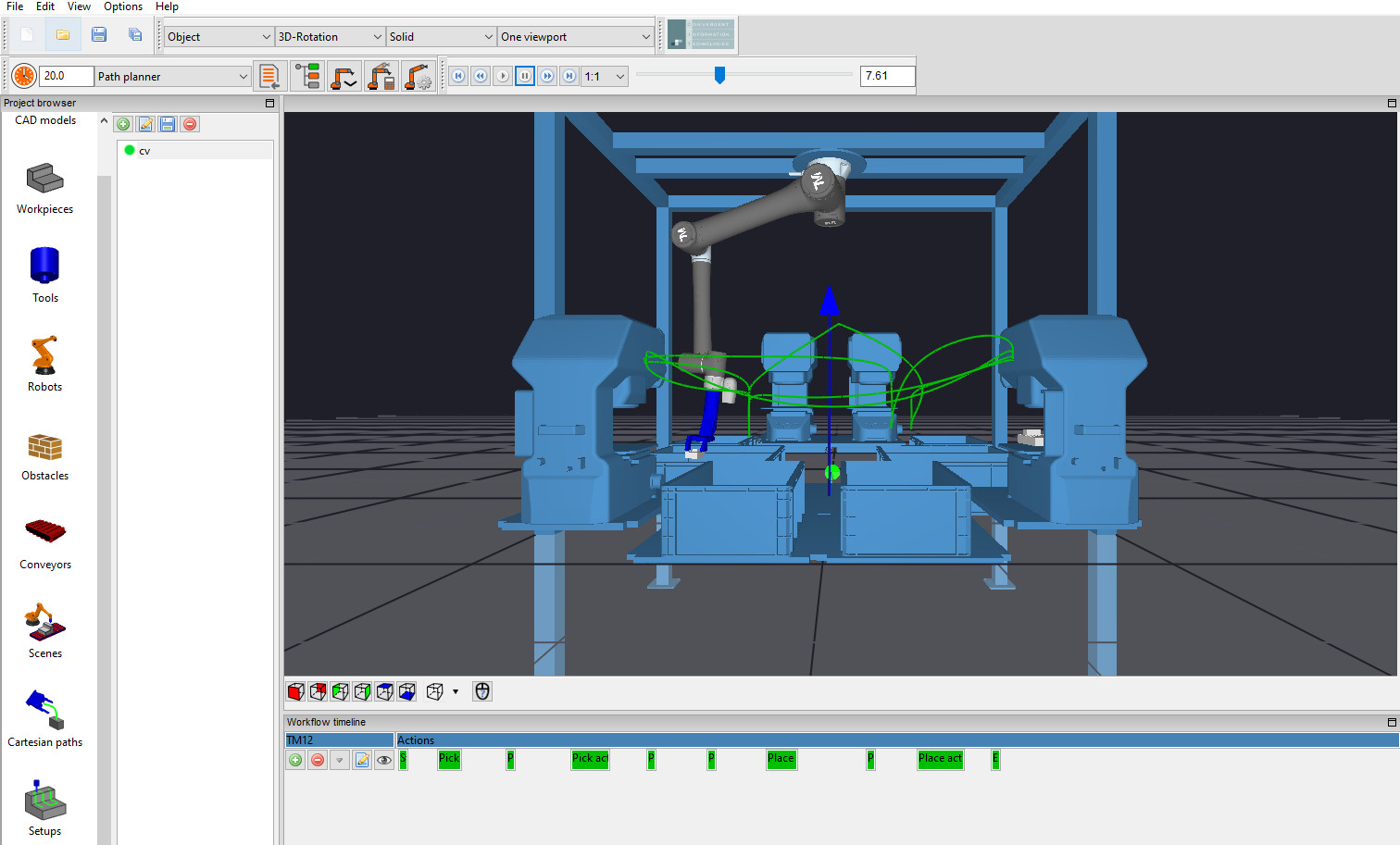
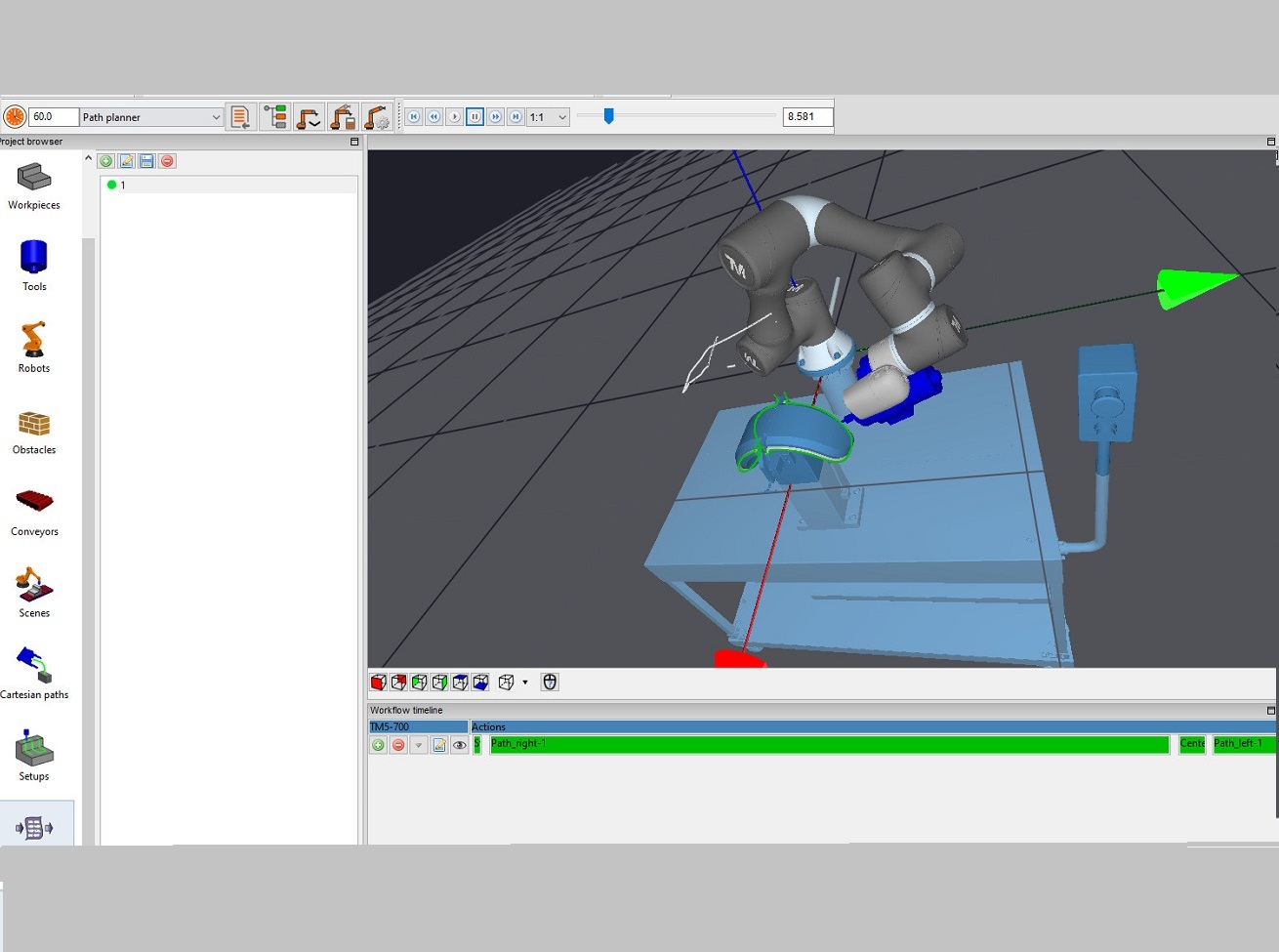
The fast and reliable grasp- and motion planning solution for robot bin picking and visual pick and place.



Schedule a maintenance appointment
SUBSCRIBE TO RECEIVE MONTHLY NEWSLETTER
We're committed to your privacy. Temas uses the information you provide to us to contact you about our relevant content, products, and services. You may unsubscribe from these communications at any time. For more information, check out our privacy policy.