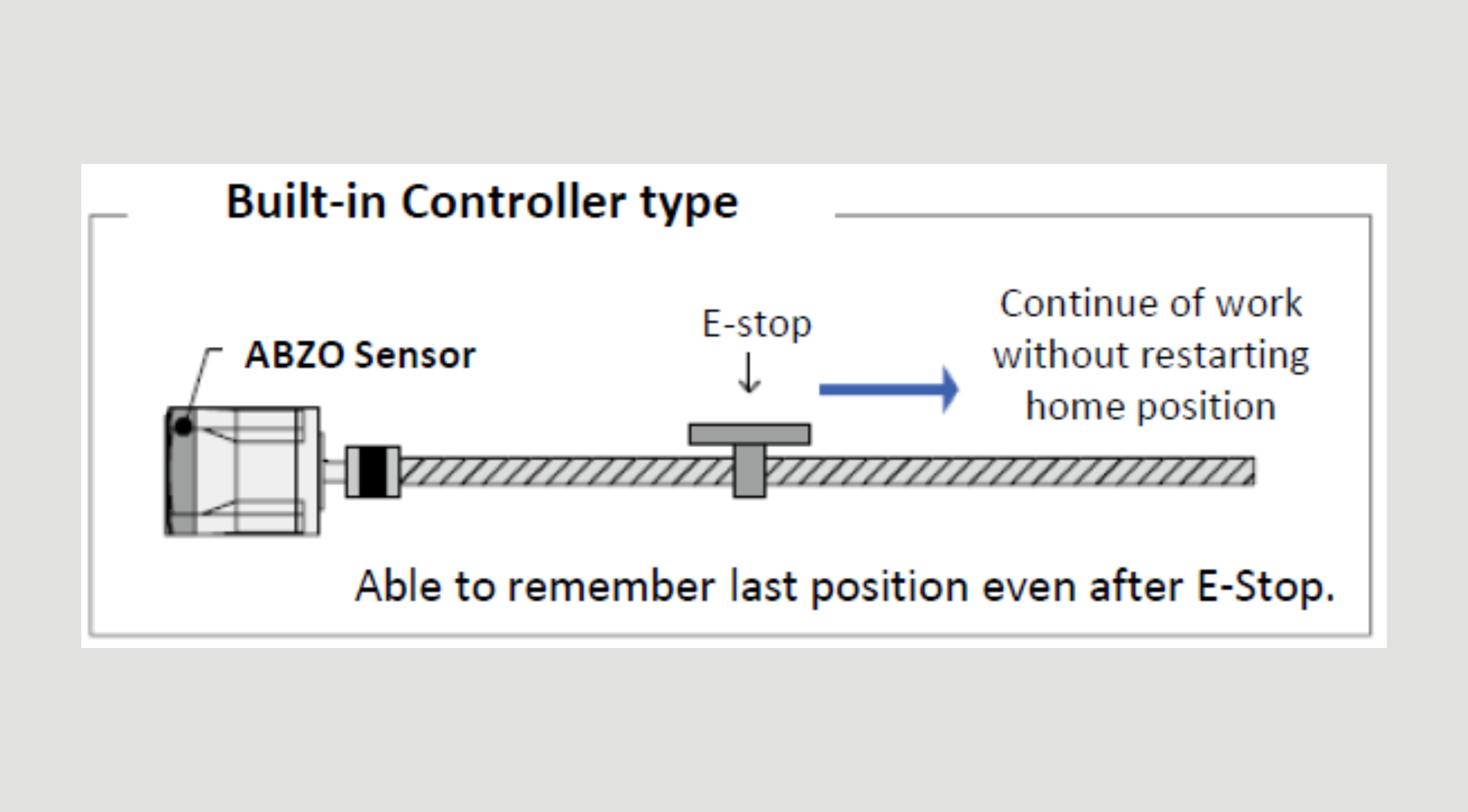
Động cơ bước vòng kín dòng AZ với cảm biến ABZO, đầu vào nguồn điện DC FLEX (Loại bộ điều khiển tích hợp và trình điều khiển tương thích với mạng)











đặt lịch bảo trì bảo dưỡng
Đăng ký nhận tin từ Temas
Khi ấn đăng ký bạn đồng ý với các điều khoản của Temas. Temas cam kết bảo mật thông tin của bạn. Chúng tôi sử dụng thông tin mà bạn đã cung cấp để gửi những thông tin, sản phẩm và dịch vụ liên quan. Bạn có thể dừng nhận tin bất cứ lúc nào.