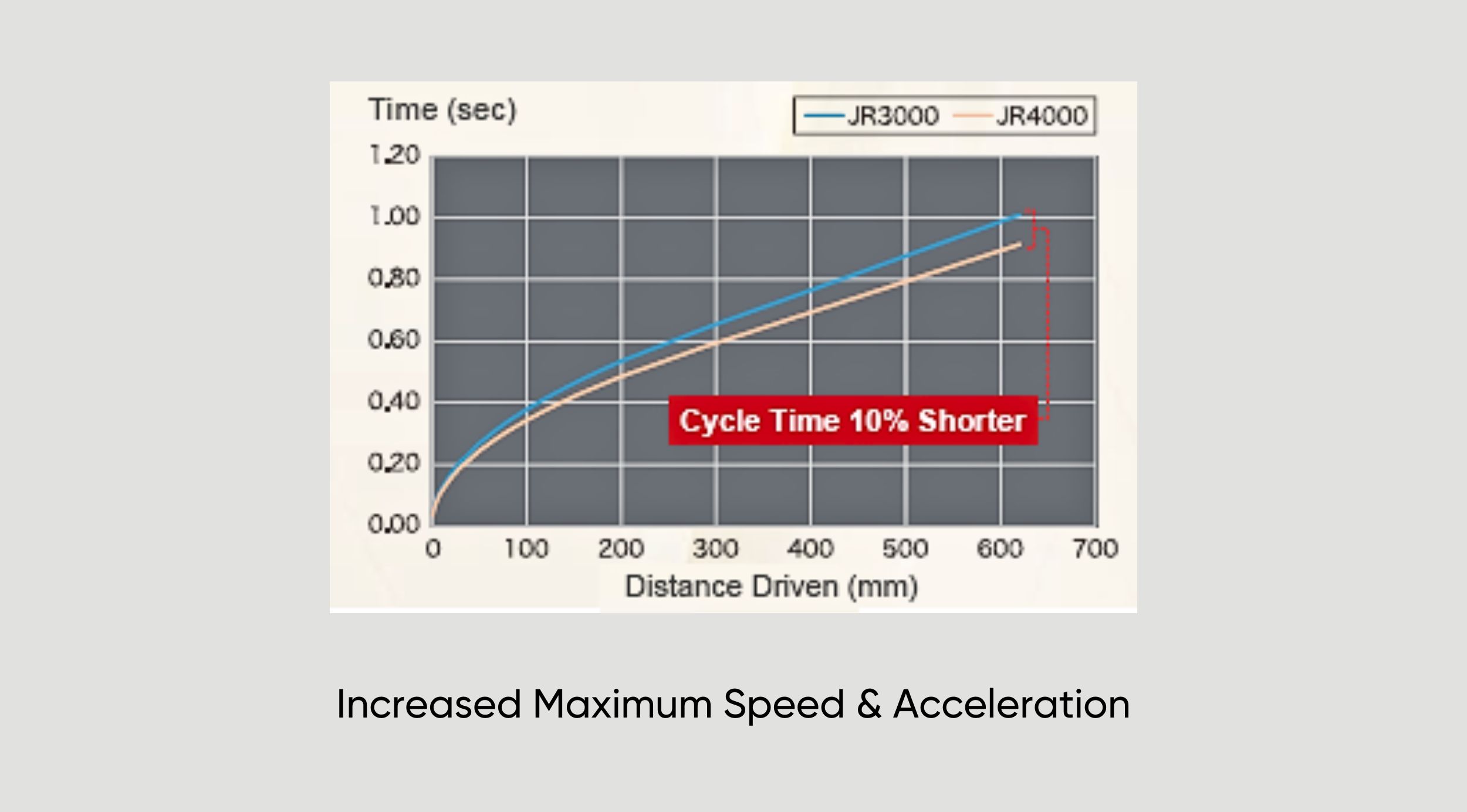
Robot để bàn thế hệ mới - dòng JR4000, từ Janome
Model: JR4203, JR4204, JR4303, JR4304, JR4403, JR4404, JR4503, JR4504, JR4603, JR4604

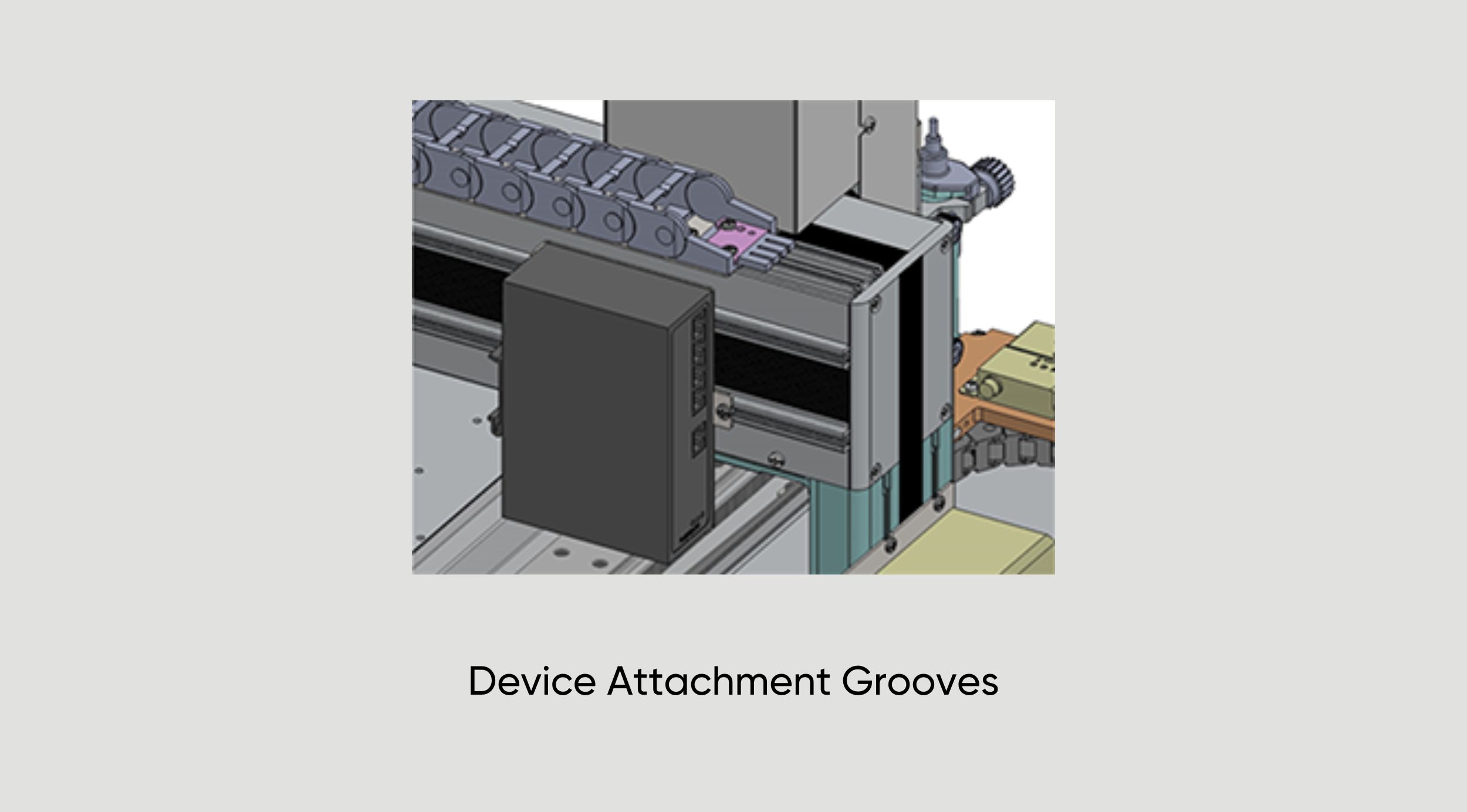

Phía trên và mặt sau cánh tay trục Y có các rãnh để gắn thiết bị ngoại vi, giúp dễ dàng tổ chức dây cáp khi lắp dụng cụ bên ngoài.

Ngoài mạch an toàn chuẩn Safety Category 1 với Performance Level PL=c, có thể chọn mạch an toàn mở rộng Safety Category 3 với Performance Level PL=d (tắt nguồn động cơ) để phù hợp với môi trường làm việc nguy hiểm.

Kết nối tối đa 2 thiết bị kiểu đầu vào xung (như stepping motor hoặc servo motor).
Hai chế độ điều khiển phù hợp với nhiều ứng dụng khác nhau:
- (Chế độ đồng bộ) Point Mode: Trục phụ di chuyển cùng với các trục X, Y, Z và R của robot, phù hợp với các ứng dụng phức tạp như gắn keo hoặc vặn vít trên bề mặt cong..
Ví dụ: Một robot 4 trục dùng để tra keo có thể mở rộng thành 6 trục. 2 trục bổ sung sẽ thay đổi góc của ống tiêm và góc của phôi, cho phép thiết lập các góc cần thiết để thực hiện tra keo chính xác trên bề mặt mép ngoài của lỗ khoét trên phôi dạng ống.- Chế độ độc lập (Independent Mode): Các trục phụ hoạt động độc lập với các trục X, Y, Z và R của robot.
Ví dụ: Robot có thể thực hiện công việc trong khi băng tải đang chạy. Các trục phụ hoạt động tách biệt với tọa độ điểm và chuyển động, cho phép robot thực hiện các nhiệm vụ như tra keo hoặc siết vít trong khi băng tải vẫn vận hành.- Nhập tín hiệu từ bộ mã hóa (Encoder Input): Nhận giá trị từ bộ mã hóa ngoài và theo dõi lượng vòng quay; đồng thời điều khiển các cảm biến..
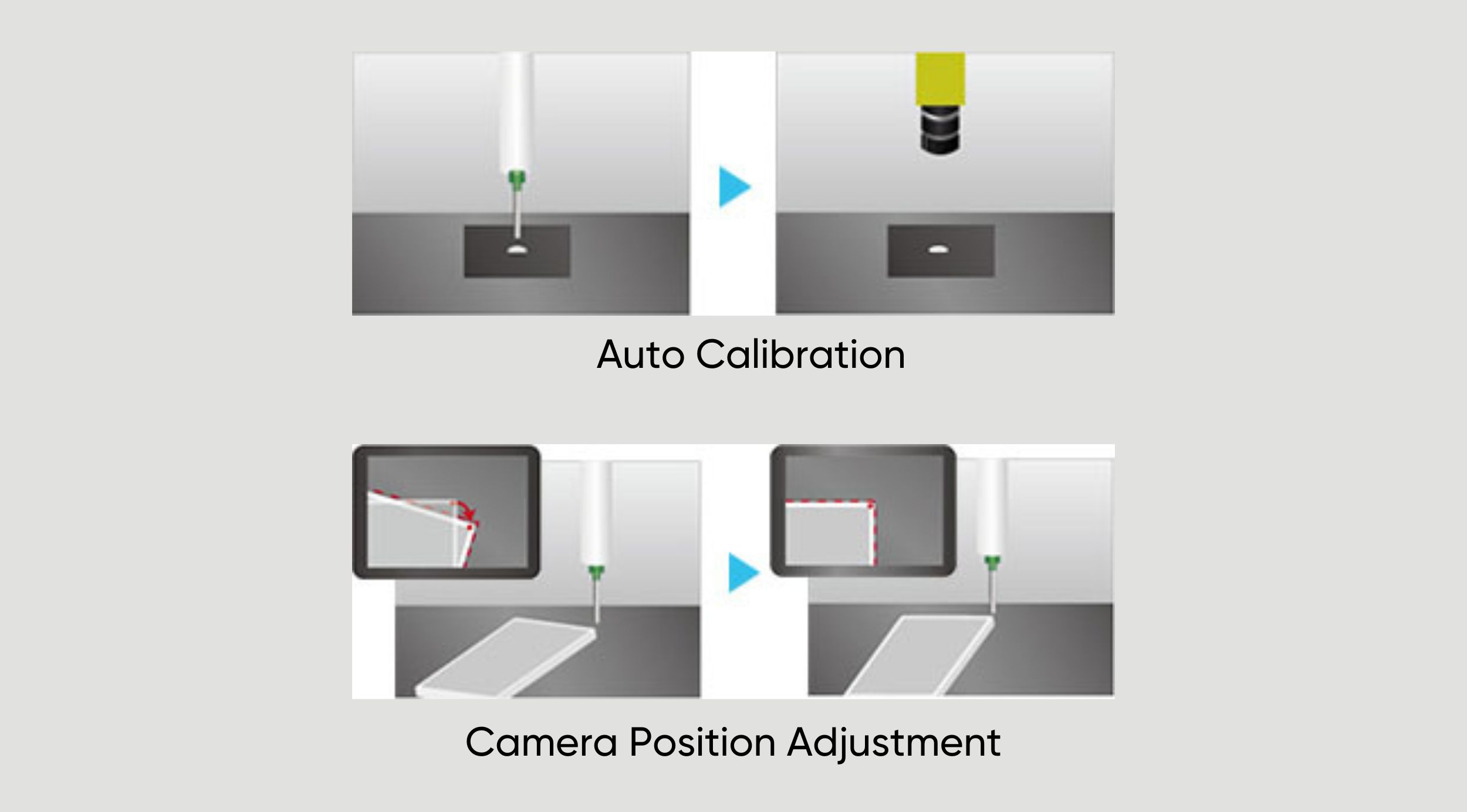
Với tùy chọn camera điều chỉnh vị trí AS200, hệ thống cho phép hiệu chỉnh vị trí chính xác đối với các phôi bị lệch.
Không cần phần mềm camera chuyên dụng; cả robot và camera đều có thể được thiết lập bằng phần mềm "JR C-Points III" độc quyền.
Hiệu chuẩn tự động - Auto Calibration
Điều chỉnh vị trí camera - Camera Position Adjustment
Ngoài các chức năng điều khiển tín hiệu và trao đổi dữ liệu theo công việc điểm từ mẫu trước đó, JR4000 được bổ sung chức năng "Fieldbus Register Output", cung cấp dữ liệu đầu ra liên tục với các loại dữ liệu đã định sẵn. Điều này cho phép người dùng lấy dữ liệu từ PLC một cách ổn định mà không cần các thiết lập phức tạp.
Lập trình robot linh hoạt với các công việc điểm, ngay cả với những công việc không có loại điểm cài đặt sẵn.
So với mẫu trước, JR4000 cung cấp nhiều lệnh và biến tích hợp hơn, cũng như khả năng tùy chỉnh chức năng được mở rộng.
*Các tính năng khác như hướng dẫn dễ sử dụng, chức năng điều chỉnh kim tiêm, v.v., vẫn được giữ nguyên từ dòng JR3000.
Phần mềm PC độc quyền "JR C-Points III" của Janome là một hệ thống nhập liệu tương tác toàn diện, cho phép người dùng tạo, chỉnh sửa và lưu dữ liệu hướng dẫn (teaching data) cũng như dữ liệu tùy chỉnh hoàn toàn trên PC.
Hiển thị đồ họa các tọa độ điểm di chuyển để người dùng dễ dàng nắm bắt nội dung chương trình một cách trực quan, đồng thời hỗ trợ chuyển đổi tọa độ từ dữ liệu CAD. Các tham số cài đặt được trình bày trong giao diện dạng cây tiện lợi, giúp xác nhận và chỉnh sửa dễ dàn
Dữ liệu hướng dẫn từ "JR C-Points II" có thể được chuyển đổi để sử dụng với "JR C-Points III" và JR4000
- Ribbon Control
Chọn tab từng danh mục, các nút chức năng và các mục cài đặt tương ứng sẽ xuất hiện, giúp dễ dàng thao tác và truy cập.- Graphic Editing View
Dạy và lập trình trực quan thông qua chế độ xem 3D trong khu vực chỉnh sửa đồ họa hiển thị 3D.- Point Data Editing View
Chỉnh sửa trực tiếp các thành phần dữ liệu điểm được chọn, bao gồm loại điểm, vị trí tọa độ, công việc điểm (point job), v.v.- JOG View
Kết nối trực tiếp với robot JR4000 và thực hiện các chuyển động JOG ngay từ PC.

Chức năng đồ hoạ điểm được cải thiện đáng kể
Khả năng tải lên 3DCAD
Dựa vào dữ liệu 3DCAD đã tải lên, tự động tạo các điểm dạy và giảm đáng kể khối lượng công việc dạy robot.
Hệ thống chương trình được tích hợp loại điểm mới, "Spline Curve Drive", cho phép xử lý cả những chi tiết có hình dạng phức tạp.

Dễ dàng điều chỉnh toạ độ điểm đăng ký
Dễ dàng điều chỉnh, phóng to hoặc thu nhỏ hình ảnh tọa độ trên màn hình đồ họa.
Điều chỉnh tọa độ sao cho khớp với robot thực tế, giúp vận hành dễ dàng và chính xác hơn.

Hướng dẫn nhanh
Chọn một mục menu hoặc chức năng và "Hướng Dẫn Nhanh" sẽ hiển thị giải thích về lựa chọn đó trên màn hình phần mềm PC. Bạn không cần phải mở lại hướng dẫn vận hành để xem nội dung của một chức năng cụ thể

Tương thích với máy tính bảng
Thay đổi giao diện người dùng giữa máy tính PC tiêu chuẩn và máy tính bảng.
Vận hành robot một cách thoải mái ngay cả trong các môi trường khác nhau.

*Để đảm bảo an toàn, hãy sử dụng Safety Commander© khi sử dụng máy tính bảng.
*Safety Commander© là thương hiệu và/hoặc nhãn hiệu đã được đăng ký của IDEC CORPORATION
Chức năng chuyển đổi tọa độ để điều chỉnh biến động bề mặt
Chức năng này cho phép chuyển đổi tọa độ công việc sao cho phù hợp với từng sản phẩm cụ thể, giúp bù đắp sự biến động khi thực hiện cùng một công việc trên các sản phẩm khác nhau. Điều này giúp quá trình triển khai công việc trở nên hiệu quả hơn vì giảm thiểu sự điều chỉnh tỉ mỉ từng công đoạn..
Chức năng Khóa Hoạt động
Có thể thiết lập mật khẩu từ tài khoản Windows có quyền quản trị viên để khóa dữ liệu, ngăn chặn việc lưu hoặc ghi đè từ các tài khoản khác.
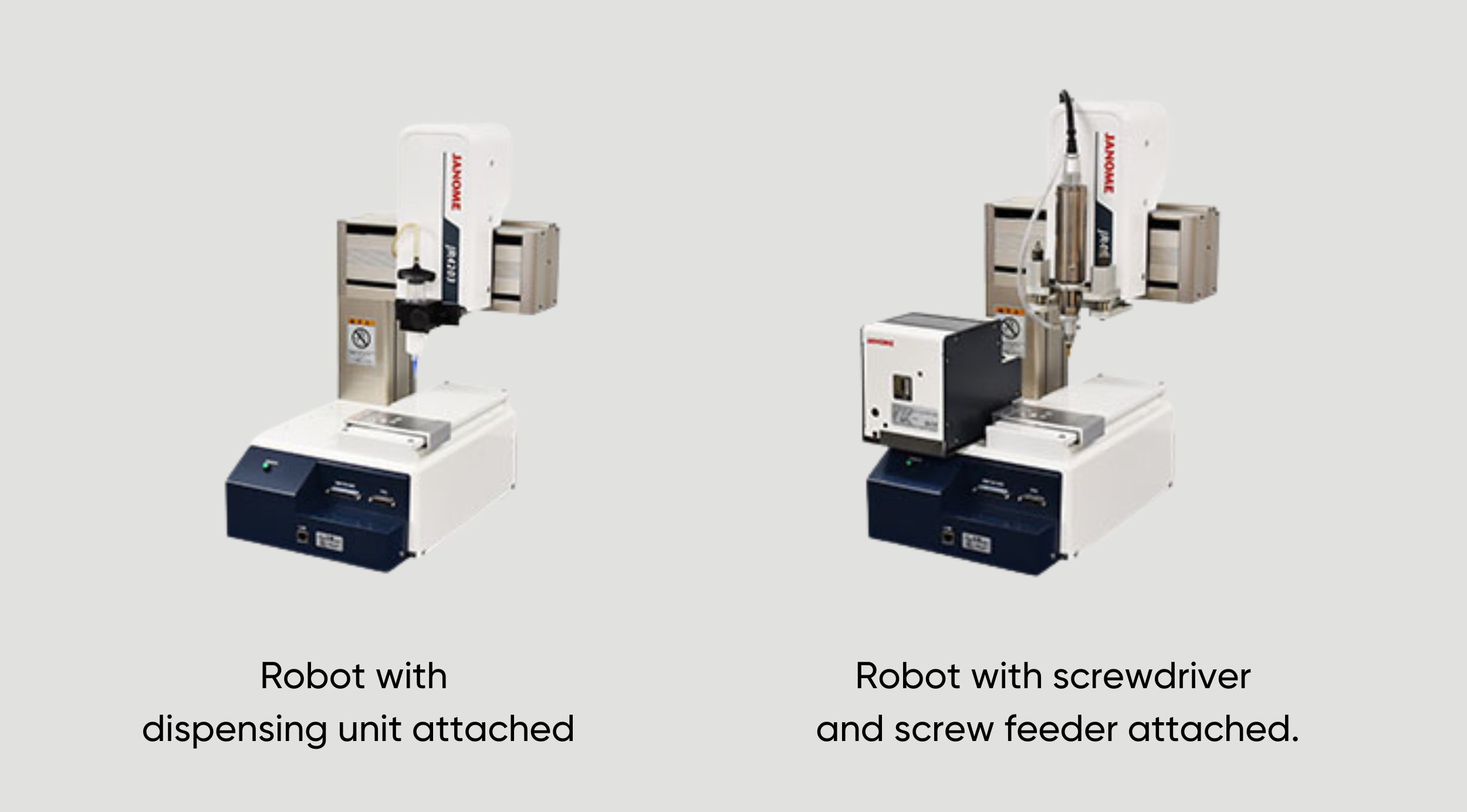
Phần mềm chuyên dụng cho ứng dụng siết vít và cấp phôi.

Robot được gắn với máy siết vít và bộ cấp vít Janome
Dễ dàng tạo chương trình siết vít: chỉ cần thiết lập vị trí công việc và các tham số siết vít như bước ren, chiều dài và tốc độ quay của máy siết vít.


Robot được trang bị đơn vị tra keo
Việc tạo chương trình tra keo trở nên dễ dàng: chỉ cần thiết lập các vị trí công việc và các tham số như tra keo điểm hoặc tra keo theo đường.
| JR4203 | JR4303 | JR4403 | JR4503 | JR4603 | ||
|---|---|---|---|---|---|---|
| Vùng làm việc | Trục X*Y | 200x200mm | 300x320mm | 400x400mm | 510x510mm | 510x620mm |
| Trục Z | 50mm | 100mm | 150mm | |||
| Tải trọng tối đa | Chi tiết (workpiece) | 7kg | 15kg | |||
| Công cụ | 3.5kg | 7kg | ||||
| Tốc độ tối đa *1 <Chuyển động PTP> ( )=dải cài đặt | Trục X - Y | 700mm/s (7~700) |
1000mm/s (10~1000) |
|||
| Trục Z | 250mm/s (2.5~250) |
400mm/s (4~400) |
||||
| Tốc độ tối đa *1 <Chuyển động CP> ( )=dải cài đặt | Tốc độ kết hợp X-Y-Z | 600mm/s (0.1~600) |
850mm/s (0.1~850) |
|||
| Sai số lặp lại *2 | Trục X | ±0.006mm | ±0.007mm | ±0.008mm | ±0.008mm | |
| Trục Y | ±0.01mm | |||||
| Trục Z | ±0.008mm | |||||
| Kích thước ngoài *3 ( )=Loại hai cột |
W×D×H *không bao gồm các phần nhô ra |
323 x 389 x 554mm |
560 x 535 x 659mm | 584 x 630 x 807 mm (615 x 631 x 807) |
678 x 730 x 807mm | 790 x 730 x 807mm |
| Trọng lượng*3 ( )=Loại hai cột |
20kg | 36kg | 42kg (45) |
45kg | 46kg | |
| JR4204 | JR4304 | JR4404 | JR4504 | JR4604 | ||
|---|---|---|---|---|---|---|
| Vùng làm việc | Trục X * Y | 200×200mm | 300×320mm | 400×400mm | 510×510mm | 510×620mm |
| Trục Z | 50mm | 100mm | 150mm | |||
| Trục R | ±360° | |||||
| Tải trọng tối đa | Chi tiết (workpiece) | 7kg | 15kg | |||
| Công cụ | 3.5kg | 7kg | ||||
| Tốc độ tối đa *1 <Chuyển động PTP> ( )=dải cài đặt | Trục X*Y | 700mm/s (7~700) |
1000mm/s (10~1000) |
|||
| Trục Z | 250mm/s (2.5~250) |
400mm/s (4~400) |
||||
| Trục R | 600°/s (6~600) |
900°/s (9~900) |
||||
| Tốc độ tối đa *1 <Chuyển động CP> ( )=dải cài đặt | Tốc độ kết hợp X - Y - Z | 600mm/s (0.1~600) |
850mm/s (0.1~850) |
|||
| Mô men quán tính chấp nhận được | 65kg - cm² | 90kg - cm² | ||||
| Sai số lặp lại *2 | Trục X | ±0.006mm | ±0.007mm | ±0.008mm | ||
| Trục Y | ±0.01mm | |||||
| Trục Z | ±0.01mm | |||||
| Trục R | ±0.008° | |||||
| Kích thước ngoài *3 ( )=Loại hai cột |
W×D×H *không bao gồm các phần nhô ra |
323 x 389 x 676mm | 560 x 535 x 844mm | 584 x 630 x 894mm (615 x 630 x 894) |
678 x 730 x 894mm | 790 x 730 x 894mm |
| Trọng lượng*3 ( )=Loại hai cột |
22kg | 39kg | 46kg (49) |
49kg | 50kg | |
*1 Tốc độ tối đa có thể thay đổi tùy thuộc vào điều kiện. Robot không thể đạt được tốc độ tối đa khi mang theo tải trọng tối đa.
*2 Độ lặp lại vị trí không đảm bảo độ chính xác tuyệt đối.
*3 Với các tùy chọn đặc biệt, kích thước bên ngoài và khối lượng của robot có thể thay đổi. Vui lòng liên hệ với chúng tôi để biết thêm chi tiết.
| Phương pháp truyền động | Động cơ bước 5 pha (có thể thêm bộ mã hóa tùy chọn) | |
|---|---|---|
| Phương pháp điều khiển | Điều khiển TP (Point to Point), điều khiển CP (Continuous Path) | |
| Nội suy | Nội suy tuyến tính 3D, nội suy cung tròn 3D và nội suy đường cong Spline | |
| Hệ thống dạy | Dạy từ xa (JOG) / Nhập liệu thủ công (MDI) | |
| Phương pháp dạy |
|
|
| Ngôn ngữ hiển thị trên màn hình | Tiếng Nhật, Tiếng Anh, Tiếng Pháp, Tiếng Tây Ban Nha, Tiếng Ý, Tiếng Đức, Tiếng Hàn, Tiếng Trung Giản thể, Tiếng Trung Phồn thể, Tiếng Séc, Tiếng Việt | |
| Dung lượng chương trình | 999 chương trình | |
| Dung lượng dữ liệu | Lên đến 32,000 điểm | |
| Chức năng PLC đơn giản | Lên đến 100 chương trình, mỗi chương trình có tối đa 1.000 bước | |
| External Input/Output | I/O-SYS (tuỳ chọn) |
16 đầu vào, 16 đầu ra |
| I/O-1 (tuỳ chọn) |
16 đầu vào, 14 đầu ra (bao gồm 2 đầu ra rơ-le) | |
| I/O-S (tuỳ chọn) |
Cổng nối cho cảm biến khu vực, v.v.
|
|
| I/O-MT (tuỳ chọn) |
Điều khiển trục phụ (kiểu đầu vào chuỗi xung); điều khiển tối đa 2 trục | |
| Field Network (tuỳ chọn) |
CC-Link, EtherNet/IP, PROFINET | |
| COM1(tuỳ chọn) | RS-232C cho điều khiển thiết bị ngoài, lệnh COM | |
| COM2, COM3 (tuỳ chọn) |
RS-232C cho điều khiển thiết bị ngoài | |
| LAN |
Cổng Ethernet cho PC
|
|
| ENC-IN (tuỳ chọn) |
Đầu vào giá trị bộ mã hóa ngoài | |
| TPU | Cổng kết nối với bộ điều khiển dạy chuyên dụng (tùy chọn) | |
| SWITCHBOX | Cổng kết nối với hộp chuyển mạch chuyên dụng | |
| Cung cấp nguồn I/O tích hợp (tùy chọn) | 24V định mức 2.1A | |
| Nguồn điện | AC100-120V/200-240V (Một pha) 50/60Hz | |
| Mức tiêu thụ điện năng | 200W | |
| Môi trường hoạt động | Nhiệt độ | 0~40°C |
| Độ ẩm tương đối | 20~90% (Không ngưng tụ) | |
| Phụ kiện tiêu chuẩn | Dây nguồn | |